全國大學(xué)生機(jī)械創(chuàng)新設(shè)計大賽一等獎
船舶漂角教具
船舶在航道內(nèi)航行時,,受到來自水流,、風(fēng)吹等外力因素以及人為因素的影響,船舶的縱軸線與航跡線間會形成一的夾角,,這一角度稱為船舶航行的漂角,。在學(xué)習(xí)船舶操縱性這門課程的過程中,,船舶回轉(zhuǎn)運(yùn)動中的漂角一直是好多同學(xué)很難理解的問題,同時,,由于沒有實際的裝置能夠模擬出這一運(yùn)動狀態(tài),,也增加了老師的授課難度,為此,,呂元博,、王春雷、楊顯原同學(xué)通過理論研究與實驗自主設(shè)計了這套船舶漂角演示教具,,以期能很好的模擬出船舶回轉(zhuǎn)運(yùn)動以及回轉(zhuǎn)過程中產(chǎn)生的漂角以及橫傾現(xiàn)象等,。該作品設(shè)計巧妙,通過凸輪與行星輪的結(jié)合,,使旋轉(zhuǎn)與伸縮同時進(jìn)行,,從而完成復(fù)雜軌跡的運(yùn)動,船模底部的萬向輪和上下層圓盤的運(yùn)動配合,,從三維角度上實現(xiàn)了船舶在回轉(zhuǎn)運(yùn)動中的橫傾現(xiàn)象,,利用桿的伸縮控制模擬控制回轉(zhuǎn)半徑與舵角的大小,制作成本較低適合課堂教學(xué)應(yīng)用,。這也是我校歷年來首次入選全國總決賽,,并代表我校榮獲全國一等獎。

全國大學(xué)生智能車競賽一等獎
全國大學(xué)生智能車競賽是以智能汽車為研究對象的創(chuàng)意性科技競賽,,其設(shè)計內(nèi)容涵蓋了自動控制,、模式識別、傳感技術(shù),、汽車電子,、電氣系統(tǒng)、計算機(jī)軟件開發(fā),、嵌入式系統(tǒng)設(shè)計,、機(jī)械設(shè)計等多個學(xué)科的知識。我校敖煥軒,、吳俊峰和張勇同學(xué)組成的參賽隊伍按大賽要求,,制作了能夠自主識別道路、實現(xiàn)自動避障的智能小車。該智能車系統(tǒng)以飛思卡爾 16位單片機(jī) MC9S12XS128MAL 為核心,,對小車進(jìn)行速度控制和方向控制,。這兩個控制都通過 PID 算法來實現(xiàn)。車模速度控制利用霍爾編碼器測速,,通過 PI 算法控制電機(jī)的轉(zhuǎn)速來實現(xiàn)車輪轉(zhuǎn)速的閉環(huán)控制,;車模方向控制利用線性CCD來檢測跑道的黑線,通過 PD 算法控制舵機(jī)打角實現(xiàn)車模的轉(zhuǎn)向控制,。除主CCD外,,還增加了縱向CCD識別強(qiáng)制掉頭區(qū)、小s與長直道,;利用陀螺儀識別坡道,;利用紅外對管識別起跑線。在本屆大學(xué)生智能車競賽中我校力克大連理工大學(xué),、哈爾濱工業(yè)大學(xué),、東北大學(xué)代表隊以東北地區(qū)第一名的成績?nèi)脒x全國總決賽,并代表我校首次榮獲全國一等獎,。

全國大學(xué)生交通科技競賽二等獎
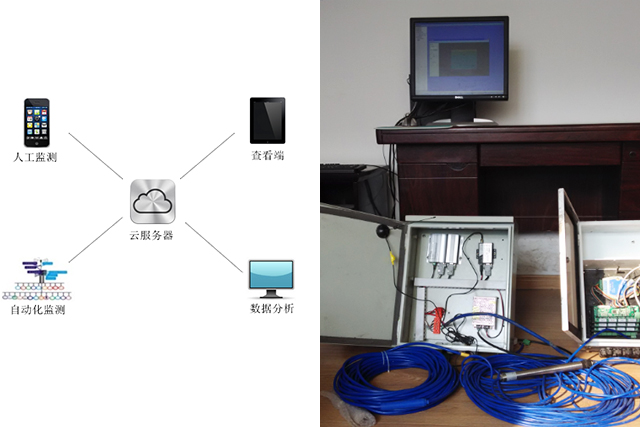
基于多元信息反饋優(yōu)化的隧道超前預(yù)警系統(tǒng)
由我校關(guān)文,、孫呈帥、仇耀宗同學(xué)共同研發(fā)的“基于多元信息反饋優(yōu)化的隧道超前預(yù)警系統(tǒng)”,,在2014年全國大學(xué)生交通科技競賽中榮獲二等獎,。該系統(tǒng)基于物聯(lián)網(wǎng)技術(shù)對隧道施工過程中地表沉降、凈空收斂,、隧道圍巖壓力,、鋼拱架應(yīng)力等數(shù)據(jù)進(jìn)行實時采集與分析,并且通過多種方式查看隧道當(dāng)前狀態(tài),。意在幫助工程師及時發(fā)現(xiàn)隧道施工過程中的危險情況,,從而采取有效措施,保證隧道安全,。自動化監(jiān)測和人工監(jiān)測信息通過移動網(wǎng)絡(luò)接入“云”端,,數(shù)據(jù)可以被數(shù)據(jù)分析終端、查詢終端等調(diào)用,。該系統(tǒng)可以與自主研發(fā)的軟件PRM 1.0,、PRS 1.0以及EEOS 1.0配合使用,完成基于云計算的隧道信息化分析,,能夠極大提高隧道施工監(jiān)測數(shù)據(jù)分析的效率和可靠性,。
供稿:大學(xué)生創(chuàng)新教育與實踐中心
(舊)")
