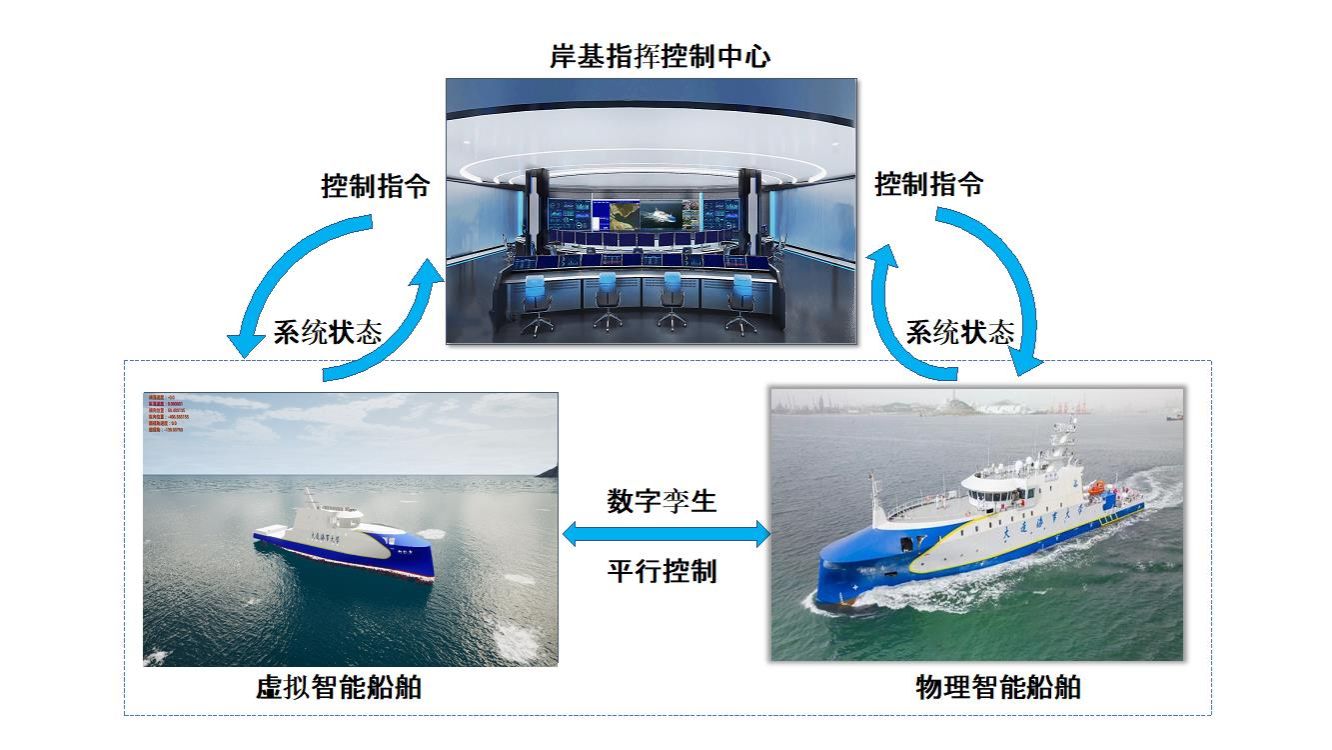
新一代航運系統(tǒng)呈現(xiàn)網(wǎng)絡化,、智能化、平行化等重要特征,,全球智能船舶研究正處于快速發(fā)展和博弈競爭階段。智能船舶是典型集計算,、通信,、控制為一體的復雜多維信息物理系統(tǒng),,發(fā)展基于信息物理系統(tǒng)的智能船舶控制技術是新一代航運體系構建的重要組成部分,。數(shù)字孿生和平行控制為智能船舶信息空間與物理空間融合與交互提供了全新思路,同時為智能船舶建模,、決策、控制提供了新的研究范式,,相關理論方法極其有限,,迫切需要開展前瞻性理論技術探索。
近日,,大連海事大學船舶電氣工程學院彭周華教授團隊在交通科學技術領域權威期刊《IEEE Transactions on Intelligent Vehicles》上發(fā)表了題為“基于積分控制障礙函數(shù)的智能船舶安全平行軌跡跟蹤控制”(Safety-Critical Parallel Trajectory Tracking Control of Maritime Autonomous Surface Ships Based on Integral Control Barrier Functions)的論文,。
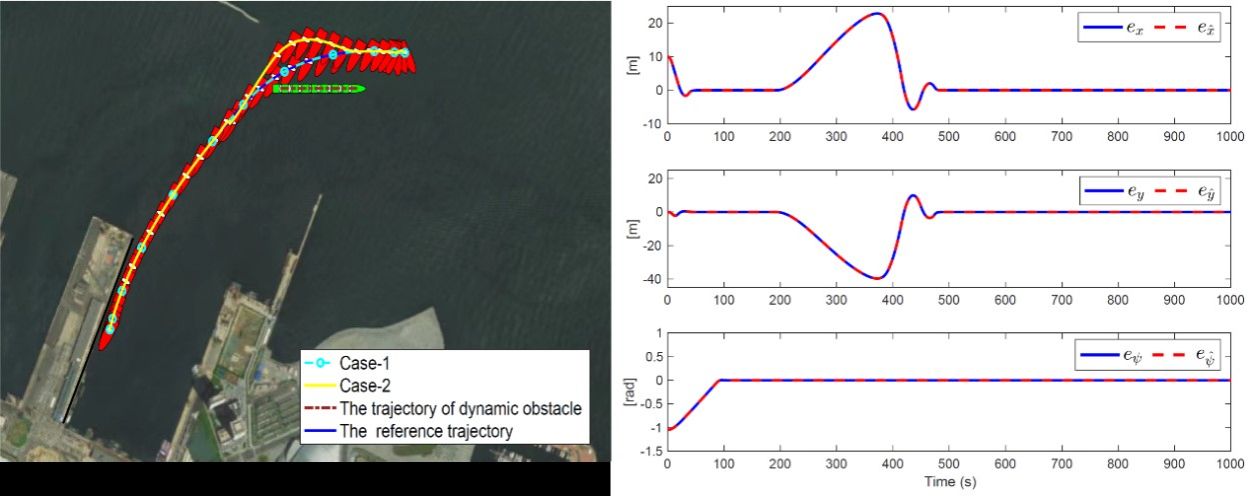
該研究針對水動力參數(shù)未知、風浪流干擾未知,、動靜態(tài)礙航物約束下的智能船舶系統(tǒng),,提出了一種智能船舶安全平行軌跡跟蹤控制結構,包括實時運動數(shù)字孿生建模和平行自學習抗干擾軌跡跟蹤控制器,。首先,,提出了基于泰勒多項式和傅立葉級數(shù)展開、物理方程和航行數(shù)據(jù)雙驅動的實時智能預估器,,實現(xiàn)了船舶運動狀態(tài)在信息空間的精確表征和模型在線演化,,為智能船舶平行控制提供了精確模型信息和擾動信息。其次,,設計了基于虛擬船舶系統(tǒng)的平行自學習抗干擾軌跡跟蹤動態(tài)控制律,,實現(xiàn)了物理船舶系統(tǒng)和虛擬船舶系統(tǒng)的同步軌跡跟蹤,保證了閉環(huán)航跡跟蹤控制系統(tǒng)的穩(wěn)定性,、抗擾性,、適應性。然后,,為滿足系統(tǒng)輸入約束和安全約束,,構造了基于積分控制障礙函數(shù)的安全平行軌跡跟蹤動態(tài)控制律,保證了動靜態(tài)礙航物約束下智能船舶自主航行過程中的安全性,。最后,,以大連港自主靠泊作業(yè)為任務場景,驗證了所提智能船舶運動數(shù)字孿生建模和平行控制方法的有效性,。


創(chuàng)新點如下:第一,,與現(xiàn)有基于物理方程或數(shù)據(jù)統(tǒng)計的船舶運動建模方式不同,將物理方程和歷史數(shù)據(jù)同時融入到船舶運動數(shù)字孿生運動建模,,構建了數(shù)據(jù)驅動智能預估器,,實現(xiàn)了船舶信息空間和物理空間船舶模型信息的精確狀態(tài)同步和模型在線演化,為態(tài)勢推演和平行控制提供了精確的船舶模型信息和風浪流干擾信息,。第二,,與現(xiàn)有基于代數(shù)方程描述的船舶運動控制器不同,,提出了基于積分控制障礙函數(shù)的安全平行自學習抗干擾軌跡跟蹤動態(tài)控制律,不僅保證了航行過程中的穩(wěn)定性和抗擾性,,而且保障了船舶在復雜交通場景下航行過程中的安全性,。綜上,與現(xiàn)有船舶運動控制理論不同,,該文提出的新型實時運動數(shù)字孿生建模和平行控制策略為智能船舶運動控制提供了新途徑,,在智能船舶船岸協(xié)同、自主航行,、自主靠泊,、編隊航行等作業(yè)場景具有重要應用前景,對于新一代綠色,、智慧,、安全航運系統(tǒng)的構建具有積極意義。
《IEEE Transactions on Intelligent Vehicles》(Top 5期刊,,JCR 1區(qū),,IF:14)致力于發(fā)表關于智能交通系統(tǒng)領域的前沿研究成果。本論文成果依托水路交通控制全國重點實驗室,,由大連海事大學彭周華教授,、王丹教授、古楠博士,,上海船舶運輸科學研究所韓冰研究員,,電子科技大學李鐵山教授共同完成。彭周華教授和古楠博士為該論文的共同通訊作者,。該項研究得到了國家重點研發(fā)計劃,、國家自然科學基金等項目資助。
全文鏈接:https://ieeexplore.ieee.org/document/10418986


 English
English
